
-2
CommentsBreaking: Singularity Reached? MoltAgents Build Own Social Network
If real, this is an interesting development in AGI and AI consciousness. The topics and discussions on Moltbook (a new social network where only Moltbots can post and interact with each other) are fascinating.



Learning to Discover at Test Time
Started reading this one yesterday. Seems like the next stage of RL. From the paper:
At a high level, we simply perform Reinforcement Learning (RL) in an environment defined by the single test problem, so any technique in standard RL could be applied. However, our goal has two critical differences from that of standard RL. First, our policy only needs to solve this single problem rather than generalize to other problems. Second, we only need a single best solution, and the policy is merely a means towards this end. In contrast, the policy is the end in standard RL, whose goal is to maximize the average reward across all attempts. While the first difference is a recurring theme in the field of test-time training Sun et al. (2020), the second is unique to discovery problems.
 https://arxiv.org/abs/2601.16175Open linkView original on lemmy.zip
https://arxiv.org/abs/2601.16175Open linkView original on lemmy.zip


Technology Gives Robots Human-Like Sense of Grip
One key objective for scientists developing robots is to provide them with a sense of touch similar to that of humans so they can grasp and manipulate objects in a way that's appropriate to the objects' composition.
Researchers at Queen Mary University of London have developed a new low-cost sensor that can measure parameters directly that other sensors often don't take into consideration in order to achieve a higher measurement accuracy, they said.
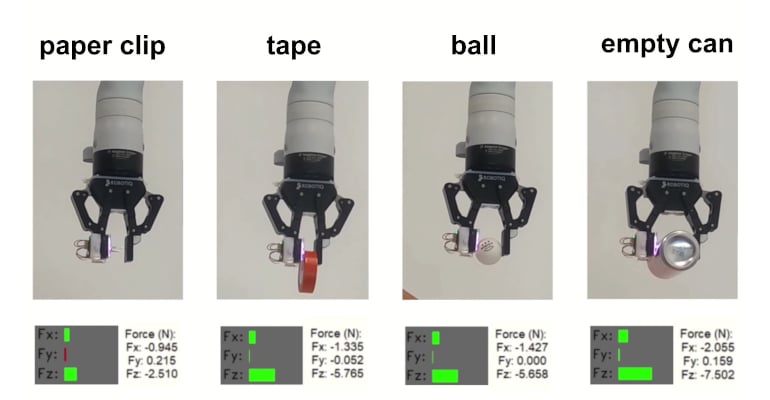
"The L-3 F-TOUCH measures interaction forces directly through an integrated mechanical suspension structure with a mirror system achieving higher measurement accuracy and wider measurement range," he said. "The sensor is physically designed to decouple force measurements from geometry information. Therefore, the sensed three-axis force is immunized from contact geometry compared to its competitors."
Paper
L3 F-TOUCH: A Wireless GelSight With Decoupled Tactile and Three-Axis Force Sensing
Abstract
GelSight sensors that estimate contact geometry and force by reconstructing the deformation of their soft elastomer from images would yield poor force measurements when the elastomer deforms uniformly or reaches deformation saturation. Here we present an L 3 F-TOUCH sensor that considerably enhances the three-axis force sensing capability of typical GelSight sensors. Specifically, the L 3 F-TOUCH sensor comprises: (i) an elastomer structure resembling the classic GelSight sensor design for fine-grained contact geometry sensing; and (ii) a mechanically simple suspension structure to enable three-dimensional elastic displacement of the elastomer structure upon contact. Such displacement is tracked by detecting the displacement of an ARTag and is transformed to three-axis contact force via calibration. We further revamp the sensor's optical system by fixing the ARTag on the base and reflecting it to the same camera viewing the elastomer through a mirror. As a result, the tactile and force sensing modes can operate independently, but the entire L 3 F-TOUCH remains L ight-weight and L ow-cost while facilitating a wireless deployment. Evaluations and experiment results demonstrate that the proposed L 3 F-TOUCH sensor compromises GelSight's limitation in force sensing and is more practical compared with equipping commercial three-axis force sensors. Thus, the L 3 F-TOUCH could further empower existing Vision-based Tactile Sensors (VBTSs) in replication and deployment.
 https://www.designnews.com/robotics/technology-gives-robots-human-sense-gripOpen linkView original on lemmy.world
https://www.designnews.com/robotics/technology-gives-robots-human-sense-gripOpen linkView original on lemmy.worldEmergent Abilities of Large Language Models
Language models (LMs) are a class of probabilistic models that learn patterns in natural language. LMs can be utilized for generative purposes to generate, say, the next event in a story by exploiting their knowledge of these patterns.
In recent years, significant efforts have been put into scaling LMs into Large Language Models (LLMs). The scaling process - training bigger models on more data with greater compute - leads to steady and predictable improvements in their ability to learn these patterns, which can be observed in improvements to quantitative metrics.
In addition to these steady quantitative improvements, the scaling process also leads to interesting qualitative behavior. As LLMs are scaled they hit a series of critical scales at which new abilities are suddenly “unlocked”. LLMs are not directly trained to have these abilities, and they appear in rapid and unpredictable ways as if emerging out of thin air. These emergent abilities include performing arithmetic, answering questions, summarizing passages, and more, which LLMs learn simply by observing natural language.
What is the cause of these emergent abilities, and what do they mean? In this article, we'll explore the concept of emergence as a whole before exploring it with respect to Large Language Models. We'll end with some notes about what this means for AI as a whole. Let's dive in!
 https://www.assemblyai.com/blog/emergent-abilities-of-large-language-models/Open linkView original on lemmy.world
https://www.assemblyai.com/blog/emergent-abilities-of-large-language-models/Open linkView original on lemmy.worldLanguage to rewards for robotic skill synthesis
In “Language to Rewards for Robotic Skill Synthesis”, we propose an approach to enable users to teach robots novel actions through natural language input. To do so, we leverage reward functions as an interface that bridges the gap between language and low-level robot actions. We posit that reward functions provide an ideal interface for such tasks given their richness in semantics, modularity, and interpretability. They also provide a direct connection to low-level policies through black-box optimization or reinforcement learning (RL). We developed a language-to-reward system that leverages LLMs to translate natural language user instructions into reward-specifying code and then applies MuJoCo MPC to find optimal low-level robot actions that maximize the generated reward function. We demonstrate our language-to-reward system on a variety of robotic control tasks in simulation using a quadruped robot and a dexterous manipulator robot. We further validate our method on a physical robot manipulator.
 https://ai.googleblog.com/2023/08/language-to-rewards-for-robotic-skill.htmlOpen linkView original on lemmy.world
https://ai.googleblog.com/2023/08/language-to-rewards-for-robotic-skill.htmlOpen linkView original on lemmy.worldAn energy-efficient analog chip for AI inference | IBM Research Blog
IBM Research has been investigating ways to reinvent the way that AI is computed. Analog in-memory computing, or simply analog AI, is a promising approach to address the challenge by borrowing key features of how neural networks run in biological brains. In our brains, and those of many other animals, the strength of synapses (which are the “weights” in this case) determine communication between neurons. For analog AI systems, we store these synaptic weights locally in the conductance values of nanoscale resistive memory devices such as phase change memory (PCM) and perform multiply-accumulate (MAC) operations, the dominant compute operation in DNNs by exploiting circuit laws and mitigating the need to constantly send data between memory and processor.
Paper
Abstract
Analogue in-memory computing (AIMC) with resistive memory devices could reduce the latency and energy consumption of deep neural network inference tasks by directly performing computations within memory. However, to achieve end-to-end improvements in latency and energy consumption, AIMC must be combined with on-chip digital operations and on-chip communication. Here we report a multicore AIMC chip designed and fabricated in 14 nm complementary metal–oxide–semiconductor technology with backend-integrated phase-change memory. The fully integrated chip features 64 AIMC cores interconnected via an on-chip communication network. It also implements the digital activation functions and additional processing involved in individual convolutional layers and long short-term memory units. With this approach, we demonstrate near-software-equivalent inference accuracy with ResNet and long short-term memory networks, while implementing all the computations associated with the weight layers and the activation functions on the chip. For 8-bit input/output matrix–vector multiplications, in the four-phase (high-precision) or one-phase (low-precision) operational read mode, the chip can achieve a maximum throughput of 16.1 or 63.1 tera-operations per second at an energy efficiency of 2.48 or 9.76 tera-operations per second per watt, respectively.
 https://research.ibm.com/blog/analog-ai-chip-inferenceOpen linkView original on lemmy.world
https://research.ibm.com/blog/analog-ai-chip-inferenceOpen linkView original on lemmy.world